Not much progression has been made since the last post, therefore I will keep this post short.
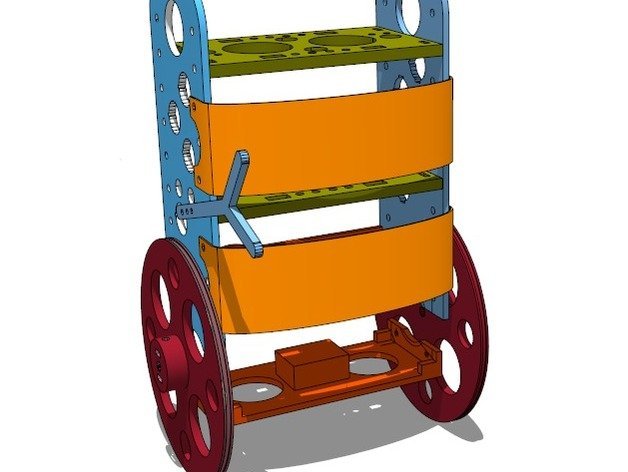
I have only recently continued this project a few weeks ago as I was busy before that. In the past few weeks, I encountered many problems with the current design of my self balancing robot, which included the servo motor, battery, etc. Other than that, I did further research on how others have successfully built a (working) self balancing robot. Base on my research, I concluded that my design may be flawed and I may be rebuilding my self balancing robot using:
- DC Motors
- Guide from JJRobots: http://jjrobots.com/projects-2/b-robot/
- Open-sourced body design (Maybe with some modifications): http://www.thingiverse.com/thing:700637

But before I resort to the last option of rebuilding the robot, I’ll still keep on researching about PID controller, robot design, etc.